Poppy fait un marathon - Installations de l'exposition Gestes
Publié par Thomas Peyruse, le 19 septembre 2017 2.1k

Geste vs mouvement
En danse contemporaine ou en théâtre, quand on effectue un mouvement sur scène, si ce mouvement est isolé, il n’existe que par sa justesse dans le paysage ou le scénario. Ce mouvement qui n’est qu’un déplacement de matière prend une autre dimension. D’autres disciplines travaillent sur cette problématique comme la marionnette ou encore le cinéma et le cinéma d’animation.
Avec juste des déplacements de matière, on créé du sens, un geste. La magie réside donc à transformer un mouvement en geste. Quelle est donc la différence entre un mouvement et un geste ?
Une manière d’aborder cette problématique consiste à utiliser des formes robotiques, c’est-à-dire une œuvre plastique qui peut bouger de manière passive ou active par l’intermédiaire de moteurs.
Nous sommes la société KONEXinc qui travaille dans le développement durable dans les bâtiments à travers la robotique. Nous avons aussi la caractéristique de proposer des prestations autour d'installations artistiques et de spectacle pour booster notre force d'innovation au service des clients et prendre le recul éthique nécessaire. KONEXinc est actuellement hébergé par le Starter de la Mêlée au Quai des Savoirs.
Science Animation nous a donc commandé deux installations autour du geste et des robots Ergo et Poppy conçus par le laboratoire INRIA Flowers. L'installation autour de Poppy est inspirée d'une installation qui a été présentée par la compagnie Parabole à Caen.
Marionnette électrique
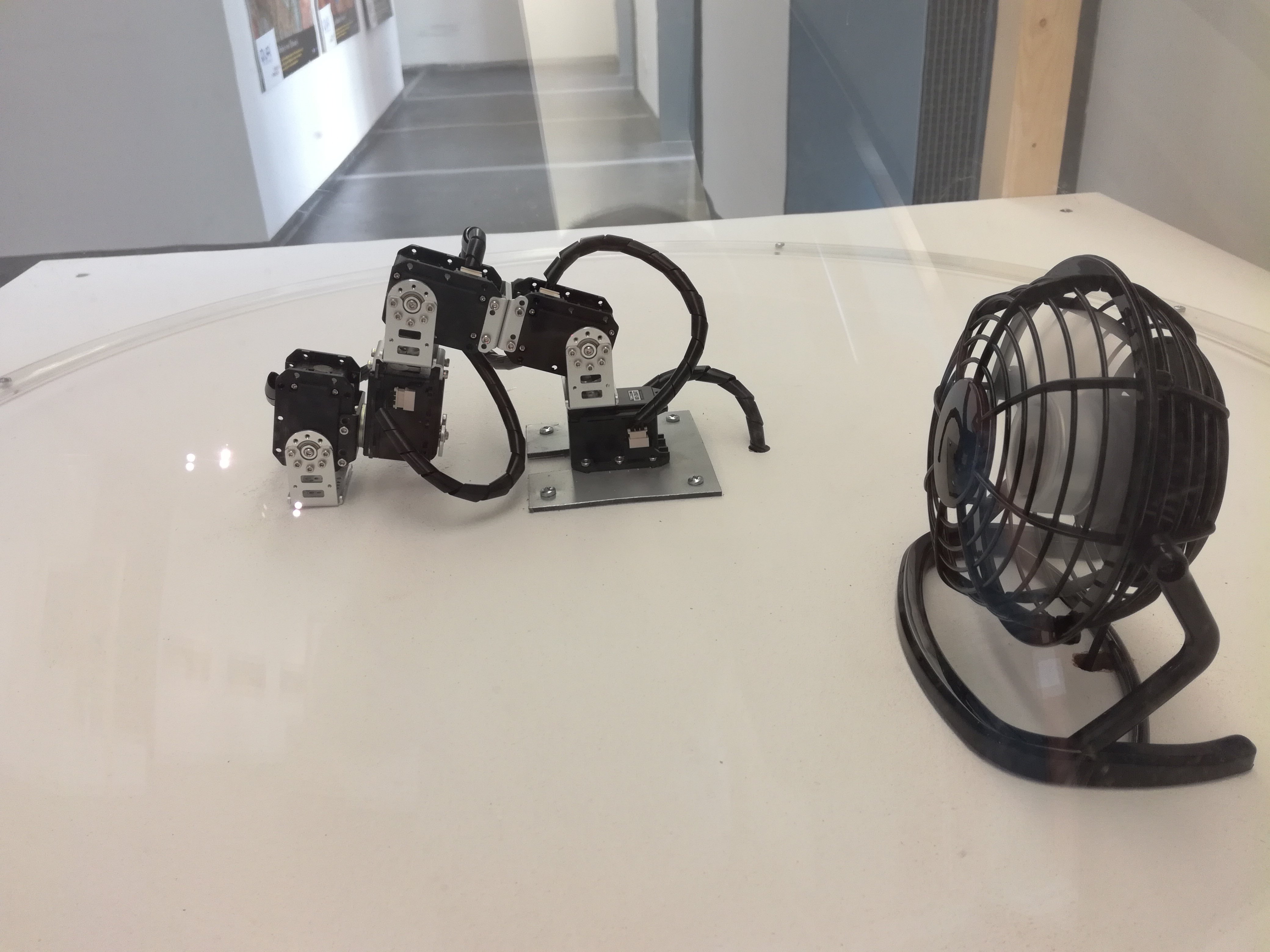
La première, avec le petit robot, est un petit bras articulé dont les moteurs sont mis les uns à la suite des autres par l’intermédiaire de « fourchettes en U ». Au repos, il forme une sorte d’arche alliant plastique et métal. Puis en passant la main au dessus du capteur « Leap Motion », la machine bouge en synchronisation. On remarque d’un coup par ses mouvements qu'il ressemble à un petit être-vivant auquel on peut prêter différentes émotions, comportements. Après plusieurs études sur le sujets, nous nous sommes appuyés sur de nombreux arts et technologies : la marionnette, le théâtre, le clown, l’automatique avancée ou encore l’algèbre linéaire.
Devenir le-tout-puissant pour quelques secondes au @QuaiDesSavoirs pic.twitter.com/U1RwFc4MSr
— Alric Amirault (@a_amrlt) 17 septembre 2017
Le design
Le premier principe à comprendre est que chaque moteur du bras est commandé par un ordinateur afin qu’il se mette à un angle donné, en degrés. Le moteur du cou peut ainsi être mis à 15.4degrés par une simple demande. On appelle cet angle une coordonnée paramétrique.
Ensuite, quand on connait les coordonnées paramétriques de chaque moteur, il faut en déduire la forme globale du robot, c’est-à-dire les coordonnées X, Y et Z de chaque point du robot. Pour cela, on fait appel à ce que l’on appelle la « cinématique directe » qui est un ensemble de calculs trigonométriques qui transforme les coordonnées paramétriques en coordonnées articulaires.
Ainsi, dans le logiciel de ce robot, il existe un robot virtuel qui a la même forme que le vrai robot. C’est grâce à ce petit robot virtuel que nous allons désormais travailler.
La marionnette
Nous allons désormais appliquer à cet avatar de robot quelques principes de marionnette. En effet, les marionnettistes, contrairement à ce que l’on pourrait penser ne contrôlent pas entièrement leur marionnette. Il y aurait beaucoup trop de concentration à avoir et l’art de la marionnette consiste justement à ce que la marionnette « se débrouille ». Le théoricien A. G. Dwiggins explique notamment que c’est la marionnette qui bouge par les frottements, les poids, contrepoids ou encore butées mécaniques judicieusement placées. Le marionnettiste ne fait que guider les mouvements. Une marionnette est donc un ensemble mécanique évoluant dans un ensemble de contraintes très complexes.
C’est ainsi qu’au lieu de piloter le robot selon un algorithme complexe, nous allons plutôt le soumettre à des contraintes très simples. Le robot devra alors se débrouiller pour suivre ces contraintes. Il utilise pour cela un algorithme dit d’optimisation. Pour faire simple, cet algorithme va déplacer un tout petit peu le robot virtuel dans tous le sens et choisir la position qui lui permet de satisfaire au mieux les contraintes.
Pour le petit robot, nous avons mis plusieurs contraintes :
- -Le « visage » doit être aligné avec l’index de l’utilisateur
- -Le cou doit être positionné à la place du centre de la paume de l’utilisateur
- -Les moteurs ne doivent pas dépasser des limites maximales
- -Le moteur du thorax doit légèrement osciller pour simuler la respiration
Le regard
La première contrainte met en valeur une base de la gestuelle du visage : le regard. C’est cette petit « flèche » qui bouge et qui est alignée avec notre nez. Le regard est une base de la communication verbale mais aussi non verbale. Il est soumis à de nombreuses contraintes qu’elles soient primitives ou conscientes. Même nos animaux de compagnie, chat ou chien maitrisent cette base de la gestuelle pour communiquer avec nous. Ce mouvement est aussi très lié au concept d’attention très bien étudié et documenté par le neuroscientifique Jean-Philippe Lachaux. Il existe notamment une structure corticale appelée colliculus supérieur qui est en lien direct avec vision, muscles du visage, du cou et représentations corporelles, émotionnelles. Cette structure pilote notre regard vers « ce qui bouge », « ce qui fait boum », « ce qui est beau » de manière primitive.
La respiration
L’autre point important, très cher à la direction artistique de KONEXinc est le rythme. Un robot industriel n’aura pas de micro-rythme, il ne fait que réaliser ses tâches. Nous injectons dans les mouvements du robot la respiration. Le dosage de ce mouvement est extrêmement fin car c’est un vecteur très puissant d’empathie. La synchronisation des respirations est souvent inconsciente et ne doit pas être trop évidente. Il faut aussi que la fréquence soit en rapport avec la taille de la machine en prenant modèle sur les mammifères dont la taille est proche.
Le transfert
Enfin, on constate aussi que l’animalité qui entre dans ce petit robot est en majeure partie liée aux mouvements de l’utilisateur. Après un petit temps d’adaptation que l’on appelle « gamme » en marionnette, l’utilisateur pourra s’exprimer à travers cette marionnette. C’est ce que l’on appelle le transfert, le marionnettiste s’identifie à travers sa marionnette pour jouer comme s’il était lui-même acteur. Ce petit robot permet de simplifier et accélérer la phase de gamme pour expérimenter facilement cette notion de transfert.
Un des challenges des sciences de l’intelligence artificielle est justement de doter ces créatures de comportements gestuels fluides et justes comme si un opérateur était justement en transfert.
Poppy

L’installation d’en face, avec le robot Poppy fonctionne exactement sur le même principe mais avec 22 moteurs et contrairement au petit robot, même à l’état de repos, le robot évoque par sa forme humanoïde déjà un être-vivant. Le système de contraintes est encore à l’étude grâce au passage des gens au Quai des Savoirs qui constitue pour nous un véritable laboratoire vivant, loin d’être complaisant 😊
Le code
Ci dessous sont renseignés les liens vers les codes des deux machines.
Poppy nect
La fatigue
Ces machines vont être branchées jusqu'à fin janvier et confrontées au public... et notamment les enfants. Voici donc une liste des retours de pannes survenues pendant ces mois.